AUTOtech.agil
Im Verbundprojekt AUTOtech.agil soll eine offene Software- und Hardware-Architektur für das Mobilitätssystem der Zukunft geschaffen werden. Damit kann die Transformation des Straßenverkehrs aktiv mitgestaltet werden. Weitere Informationen finden sich hier:www.maschinenbau.tu-darmstadt.de.


UNICARagil
Im Projekt UNICARagil, welches aus dem universitären Forschungsnetzwerk Uni-DAS e.V. hervorgegangen ist, wird eine disruptive, modulare sowie skalierbare Fahrzeugarchitektur und Fahrzeugplattform für fahrerlose Fahrzeuge entwickelt.
Kernelemente der Forschung und Entwicklung sind eine modulare, mechatronische Plattform, eine vollständig serviceorientierte und damit updatefähige Softwarearchitektur sowie eine leistungsfähige, funktionssichere E/E-Architektur. Die bereits bei der Konzeption berücksichtigten Anforderungen an funktionale Sicherheit, IT-Sicherheit und Datenschutz sowie die modulare Erprobung von Soft- und Hardware bilden ein weiteres wichtiges, disruptives Element des Projekts.
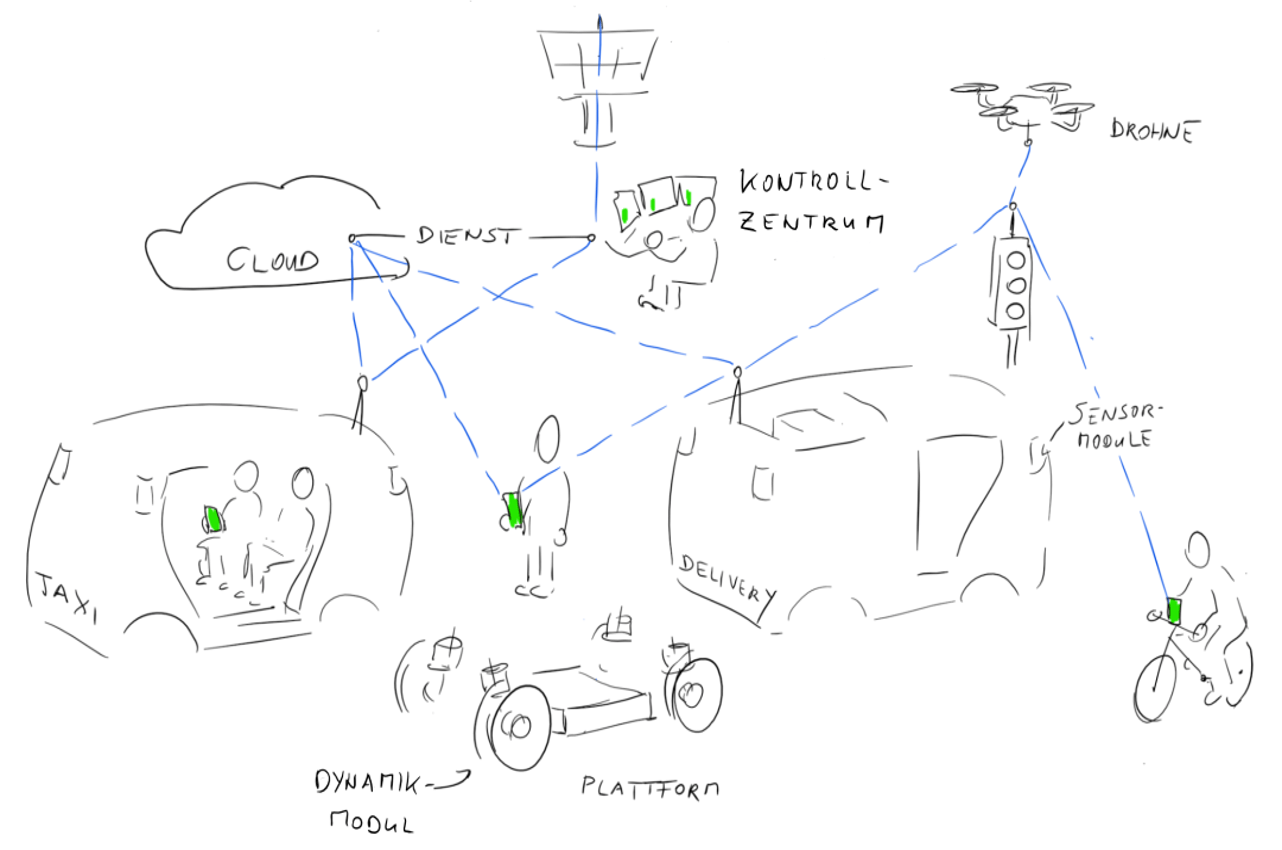
Die dargestellte Abbildung skizziert das Gesamtsystem, in dessen Zentrum die in Größe skalierbare Plattform mit Dynamikmodulen steht, die für Aufbauten zum fahrerlosen Transport von Personen und Gütern geeignet ist.
Die TU Darmstadt ist mit den Fachgebieten Fahrzeugtechnik (FZD) und Physikalische Geodäsie und Satellitengeodäsie (PSGD) mit insgesamt 5 Mitarbeitern an dem Projekt beteiligt und bearbeitet folgende Schwerpunkthemen:
• Entwicklung und Anwendung eines Konzepts zur modularen Absicherung. (FZD)
• Fahrdynamikregelung inkl. Rückfallebene zum sicheren Anhalt bei Ausfall von Teilsystemen. (FZD)
• Fahrzustandsschätzung und Lokalisierung. (PSGD)
UNICARagil startet im Februar 2018 und hat eine Laufzeit von fünf Jahren und vier Monaten. Das Projekt wird durch das Bundesministerium für Forschung und Infrastruktur (BMBF) öffentlich gefördert. Weitere Informationen finden sich hier: www.unicaragil.de