Modeling human locomotion control and its applications
2018/07/06
Title: Modeling human locomotion control and its applications
Speaker: Dr. Seungmoon Song, Standford University
Date & Time: Friday 13 July 2018 at 10am
Location: TU Darmstadt, S1|15 Alexanderstrasse 10, Room 29
Abstract:
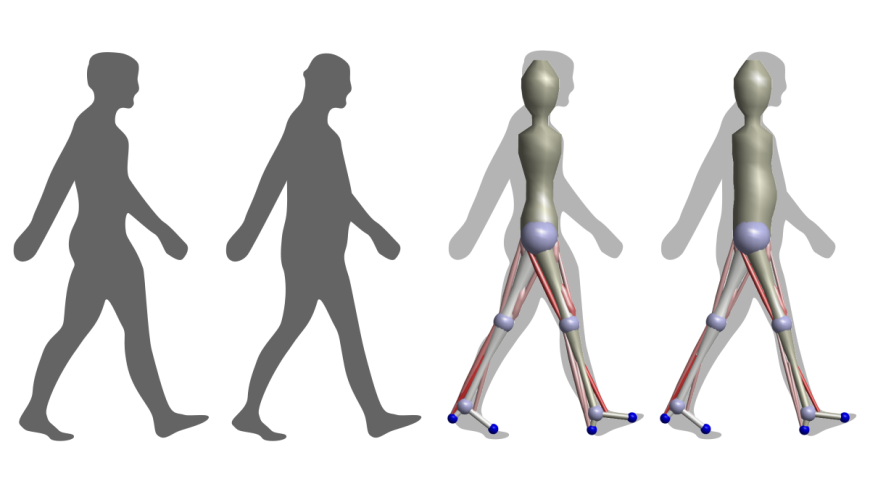
This talk describes a reflex-based model of human locomotion. The model can generate diverse human-like locomotion behaviors and shows reactions similar to those of humans in response to a range of unexpected disturbances. This model has been used to explain why healthy older adults walk slower than young adults. The behavior generated by the model is surprisingly robust and has been used for robot control as well. Such a model is useful for testing and understanding proposals for control algorithms, making testable predictions about biological motor control, as well as assessing the capabilities of a purely reflex-based system. Future work will extend the model to include central pattern generation, reflex modulation, and motor learning to adapt gait and handle terrain changes, as well as applying the model to improve rehabilitation treatment and assistive robotics.
Bio:
Seungmoon Song is a postdoctoral research fellow at Stanford University. He obtained a B.E. in Electrical and Communications Engineering at Korea Advanced Institute of Science and Technology (KAIST; ICU), M.S. in Electrical and Computer Engineering at Virginia Tech, and Ph.D. in 2017, in Robotics at Carnegie Mellon University. His research focuses to better understand and model the motor control and biomechanics of human locomotion and to apply the obtained knowledge to rehabilitation engineering.
Host: Prof. Dr. André Seyfarth

