Bioinspired neuromuscular reflex based hopping controller for robots
The legged locomotion found in humans and animals are energetic, versatile, and robust against perturbations. The functionality of the leg can be separated into three locomotor sub-functions which are stance (axial leg function), swing (rotational leg function), and balance (trunk posture control). The stance sub-function is to support body weight and create the center of mass bouncing behavior (e.g. during walking, running, etc.). Although human leg structure and the locomotion control are complex, highly simplified template models emphasizing the elastic stance leg function can describe and reproduce some basic characteristics of human walking and running gait. Hopping can be considered as a primitive motion which focuses on the stance sub-function. A better understanding of how hopping motion is generated and controlled can help us further recognize the basic principles of human locomotion.
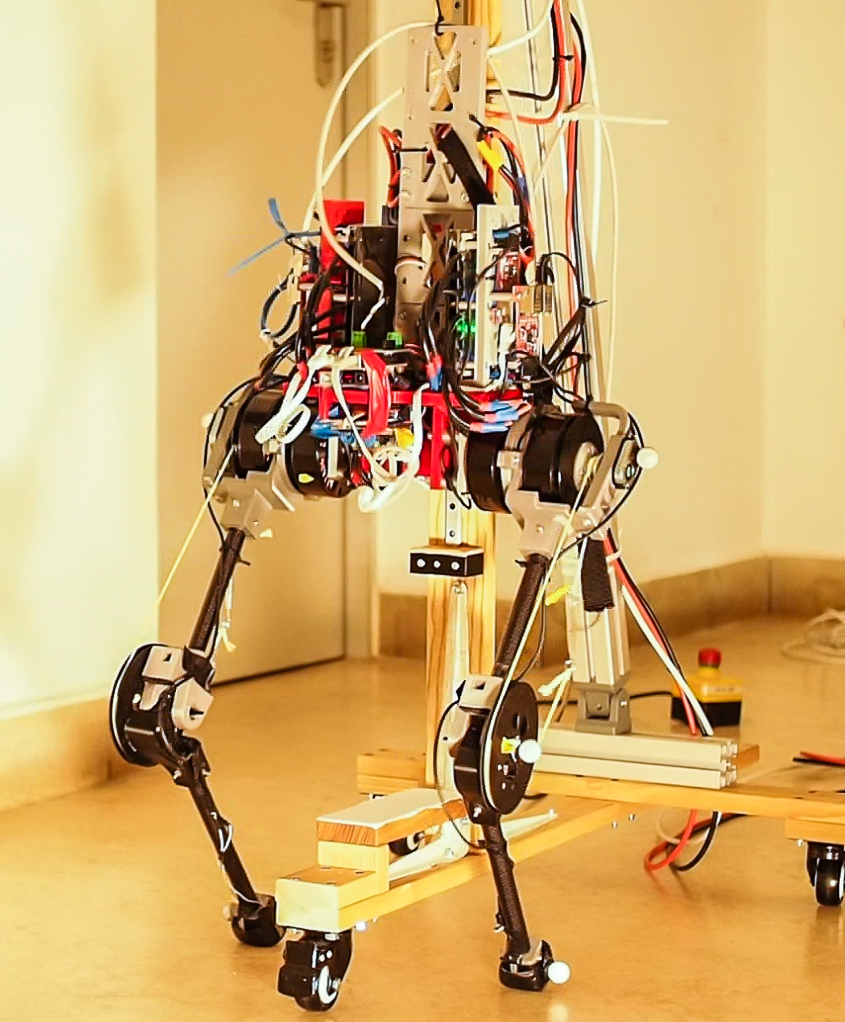
It has been shown that human-like hopping can be achieved by muscle reflex control in neuromechanical simulations. However, it is unclear if this concept is applicable and feasible for controlling a real robot. This work presents a low-cost two-segmented robotic leg design and demonstrates the feasibility and the benefits of the bio-inspired neuromuscular reflex based control for hopping.
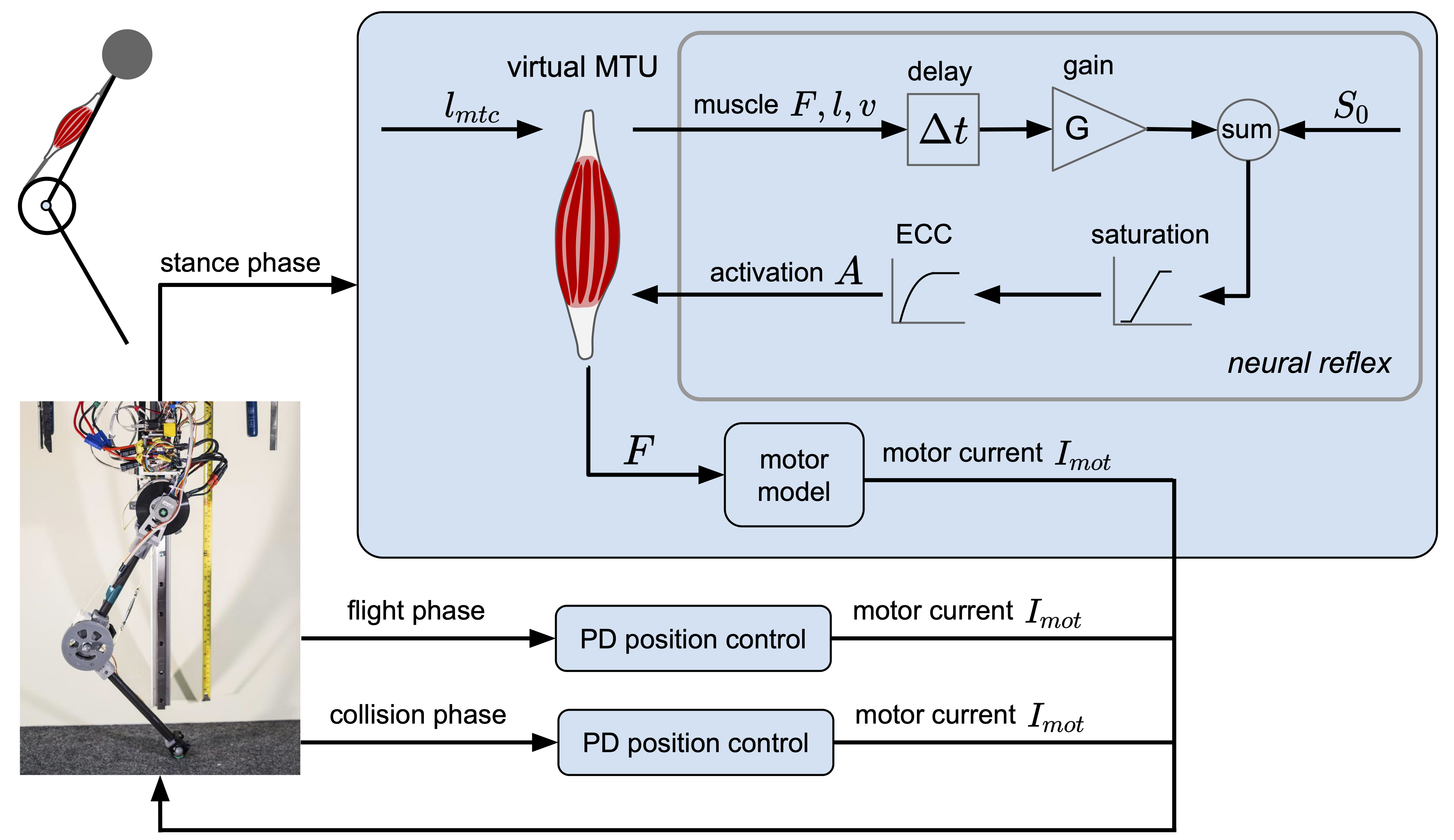
Simulation models were developed to describe the dynamics of the real robot. Different neuromuscular reflex pathways were investigated with the simulation models. We found that stable hopping can be achieved with both positive muscle force and length feedback, and the hopping height can be controlled by modulating the muscle force feedback gains with the return maps. The force feedback neuromuscular reflex based controller is robust against body mass and ground impedance changes. Finally, we implemented the controller on the real robot to prove the feasibility of the proposed neuromuscular reflex based control idea. This study demonstrates the neuromuscular reflex based control approach is feasible to implement and capable of achieving stable and robust hopping in a real robot. It provides a promising direction of controlling legged robots to achieve robust dynamic motion in the future.
For further details please check our paper.
This work was partially supported by the QSL program (Project ANSYMB, No. 00295) at Technische Universität Darmstadt and the DFG-Funded EPA Project under Grant No. AH307/2-1 and Grant No. SE1042/29-1.
Bio-inspired neuromuscular reflex based hopping controller for a segmented robotic leg (video demo)

Contacts:

