Forschungskooperation zur Mobilität der Zukunft
TU Darmstadt ist Partner im Verbund UNICARagil
08.03.2018 von RWTH Aachen / TU Darmstadt
Vor Kurzem startete das vom BMBF geförderte Projekt UNICARagil, in dem sich führende deutsche Hochschulen zusammengeschlossen haben, um das Automobil und seine Entwicklungsprozesse grundlegend neu zu entwickeln. Von der TU Darmstadt beteiligen sich die drei Fachgebiete Fahrzeugtechnik (FZD), Physikalische Geodäsie und Satellitengeodäsie (PSGD) sowie die Security Engineering Group (SecEng) an diesem Verbundprojekt.

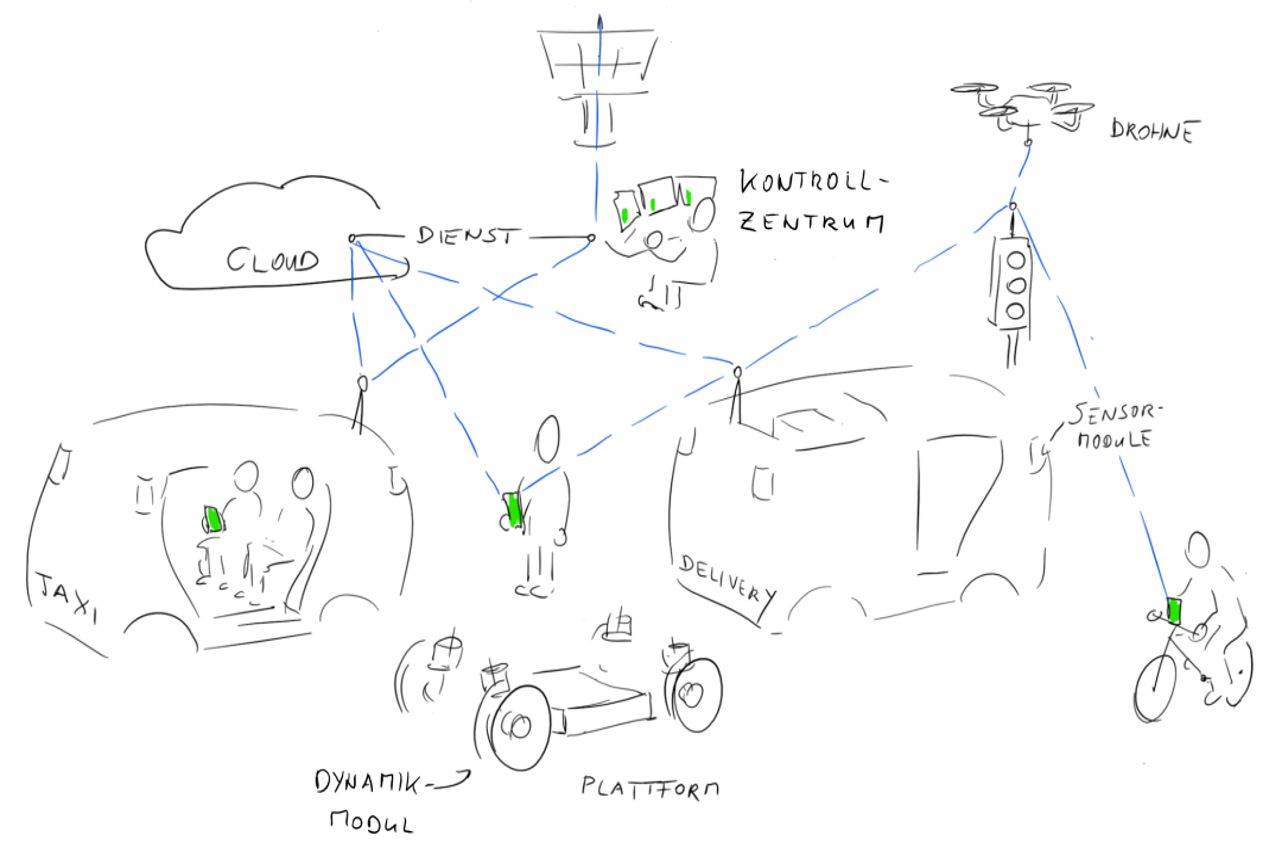
Der neuartige Ansatz des Projekts sieht unter anderem vor, Fahrzeuge mit ihrer jeweiligen Umgebung umfassend zu vernetzen. Dazu wird es wichtig sein, Nutzerdaten zu schützen und mögliche Cyber-Attacken abzuwehren. Die Security Engineering Group der TU Darmstadt wird eine entsprechende IT-Sicherheitsarchitektur entwerfen und aufbauen.
Dank individuell lenkbarer Dynamikmodule werden künftig die Fahrzeugrichtung und die Bewegungsrichtung voneinander entkoppelt werden. Dafür wird ein verlässlicher Bewegungs-Ist-Zustand der Fahrzeugplattform benötigt. Das erforderliche Konzept steuert das Fachgebiet Physikalische Geodäsie und Satellitengeodäsie bei, indem zweikanalig multiple Sensordaten kombiniert werden, die Bewegungen exakt abschätzen können.
Das Fahrzeug der Zukunft wird zwar weiterhin vier Räder haben, aber der Unterschied zwischen vorne und hinten, links und rechts wird obsolet: In jedem Rad stecken baugleiche Module, bestehend aus Elektromotor, Federung und Dämpfung. Besonders innovativ ist der große Lenkwinkel von bis zu 90 Grad – an allen Rädern. Das aufeinander abgestimmte Zusammenspiel der Einheiten soll ein Höchstmaß an Spurtreue, Bewegungs-Flexibilität und Stabilität des Fahrzeugs garantieren.
Sollte die automatische Fahrzeugführung ausfallen, wird selbstständig ein Notfallmodus aktiviert und die eingebaute Nahbereichs-Sensorik besonders wichtig: Sie sorgt dafür, dass das Fahrzeug kontrolliert anderen Verkehrsteilnehmern ausweicht und zum Stehen kommt. Die Entwicklung der Bewegungsregelung und des sicheren Anhaltens übernimmt das Fachgebiet Fahrzeugtechnik – wie auch das Erarbeiten eines innovativen Konzepts zur Absicherung der Module und Dienste, sodass möglichst auf einen Gesamtfahrzeugtest verzichtet werden kann.
Projekt UNICARagil
Das Projekt UNICARagil startete am 1. Februar 2018 und hat eine Laufzeit von vier Jahren. Es wird vom Bundesministerium für Bildung und Forschung im Rahmen des Förderschwerpunktes „Disruptive Fahrzeugkonzepte für die autonome elektrische Mobilität“ (Auto-Dis) unterstützt. Das Projektvolumen beträgt 23,3 Millionen Euro (davon 94 Prozent Förderanteil durch BMBF). Mitglieder des Konsortiums sind neben der TU Darmstadt, die RWTH Aachen, die TU Braunschweig, das Karlsruher Institut für Technologie, die TU München, die Universität Stuttgart und die Universität Ulm sowie die Industriepartner ATLATEC GmbH, flyXdrive GmbH, iMAR Navigation GmbH, IPG Automotive GmbH, Schaeffler Technologies AG & Co. KG und VIRES Simulationstechnologie GmbH.