Interactive AI algorithms & cognitive models for human-AI interaction
Picture: TU Darmstadt
IKIDA
Interactive AI algorithms & cognitive models for human-AI interaction
IKIDA was a BMFTR (formerly BMBF) funded interdisciplinary research group researching in interactive AI algorithms and cognitive models for human-AI interaction.
IKIDA is an interdisciplinary junior research group and consists out of 6 young scientists from the research fields of machine learning, robotics and cognitive science.
The overall technical and scientific goal of IKIDA is the development of interactive, probabilistic AI algorithms, which benefit from direct interaction with users. Enabling such direct interaction between AI algorithms and users is also intended to lower application hurdles of AI solutions and can potentially increase their sustainability and acceptance. For the development of the AI algorithms we particularly plan to incorporate and develop new cognitive models for human-AI and human-robot interaction.
The associated industry partners Energy Robotics (Darmstadt), Franka Emika (Munich) and Porsche Motorsport (Weissach) will help to find and evaluate practical relevant use cases for the developed interactive AI methods, such as automated data classification and robot skill learning.
16.04.2024 – IKIDA successfully convened its 4th milestone meeting with guests from research and industry.
Picture: TU Darmstadt, Dirk Balfanz
06.07.2023 – IKIDA presented its results at the hessian.AI conference and fair “AICon”. From left to right: Dr. Dorothea Koert, Susanne Trick, Dr. Dirk Balfanz, Philipp Jahr, Franziska Herbert, Vildan Salikutluk, Lisa Scherf.
The IKIDA team visited Accso – Accelerated Solutions GmbH and discussed the potential of interactive AI for industry 4.0 applications. From left to right: Manuel Schreiner, Dr. Xenija Neufeld, Jonas Kubitza, Jessica Löhr, Alina Bos, Dr. Helena Unger, Dr. Volker Jung, Lisa Scherf, David Gran, Vildan Salikutluk, Susanne Trick, Dr. Dorothea Koert
Our IKIDA Lab space is equipped with robotic arms for research on interactive robot skill learning, high performance AI computers and a motion capturing system for high precision human body tracking.
Picture: TU Darmstadt 2021, Foto: Sascha Mannel
One focus of our research is on interactive robot skill learning and how non-robotic experts can teach new skills to collaborative robots, such as the Franka Emika Panda arm.
Picture: TU Darmstadt
Together with our assosiated Industry Partner Energy Robotics we work on intuitive and interactive teaching of inspection routes to mobile ground robots, such as the Spot Robot. The picture shows our visit to industry partner Energy Robotics on 29.10.21. Left to right: João Carvalho, Dirk Balfanz, Lisa Scherf, Stefan Kohlbrecher, Spot, Dorothea Koert, Cigdem Turan (up), Susanne Trick (down), Moritz Andres, Vildan Salikutluk
A short demonstration on Interactive Reinforcement Learning With Bayesian Fusion of Multimodal Advice (see: Trick, S., Herbert, F., Rothkopf, C., & Koert, D. (2022). Interactive Reinforcement Learning With Bayesian Fusion of Multimodal Advice. IEEE Robotics and Automation Letters, 7(3), 7558-7565. DOIPDF (PDF file) (opens in new tab))
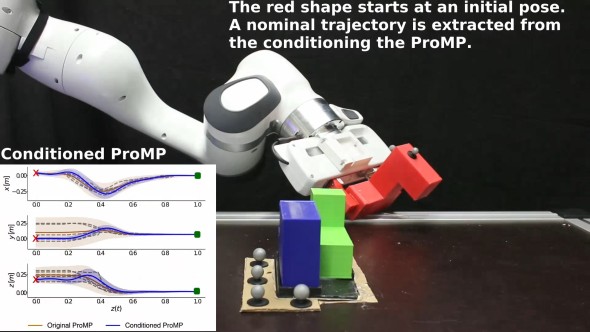
A short demonstration on Adapting Object-Centric Probabilistic Movement Primitives with Residual Reinforcement Learning (see Carvalho, J., Koert, D., Daniv, M., Peters, J. (2022). Adapting Object-Centric Probabilistic Movement Primitives with Residual Reinforcement Learning. Proceedings of the International Conference on Humanoid Robots (HUMANOIDS) 2022 (accepted) PDF (PDF file) (opens in new tab))
A short demonstration on Learning from Unreliable Human Action Advice in Interactive Reinforcement Learning (see Scherf, L.; Turan, C., Koert, D. (2022). Learning from Unreliable Human Action Advice in Interactive Reinforcement Learning. 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids). PDF (PDF file) (opens in new tab))
March 20, 2025 – Congratulations! Lisa Kempf successfully defended her dissertation “Learning from Imperfect Human Input in Interactive Machine Learning”. Learn more
January 24, 2025 – Congratulations! João Carvalho successfully defended his dissertation “Enhancing Robot Manipulation Skills through Learning”. Learn more
December 31, 2024 – IKIDA is officially completed.
December 13, 2024 – IKIDA has successfully completed its 5th and final milestone meeting under evaluation by the DLR Projektträger (Project Management Agency).
December 9, 2024 – Congratulations! Vildan Salikutluk successfully defended her dissertation “Human Problem-Solving with Interactive Artificial Intelligence”. The thesis was supervised by Prof. Dr. Frank Jäkel and Prof. Dr. Lewis Chuang. Learn more
April 26, 2024 – Congratulations! Susanne Trick successfully defended her dissertation “Bayesian Fusion of Probabilistic Forecasts”. The thesis was supervised by Prof. Constantin Rothkopf, Ph.D. and Prof. Dr. Dominik Endres. Learn more
April 16, 2024 – IKIDA successfully convened its 4th milestone meeting. With guests from research and industry in attendance, the meeting served as a platform to discuss advancements, challenges, and future prospects. Learn more
March 2024 – Our paper “An Evaluation of Situational Autonomy for Human-AI Collaboration in a Shared Workspace Setting“ got accepted at CHI ’24. See Publications for details.
March 2024 – Our short paper “Involving Affected Communities and Their Knowledge for Bias Evaluation in Large Language Models” got accepted at the “HEAL: Human-centered Evaluation and Auditing of Language Models“ Workshop @ CHI '24, Honolulu, Hawai’i, USA. See Publications for details.
January 2024 Our paper ”Are you sure? – Multi-Modal Human Decision Uncertainty Detection in Human-Robot Interaction“ got accepted at the ACM/IEEE International Conference on Human Robot Interaction (HRI) taking place March 11-15 in Boulder, Colorado. See Publications for details.
October 9, 2023 Lisa Scherf and Eya Chemangui present “Multi-Modal Human Uncertainty Detection in Human-AI Interation” at the Computational Cognition Conference 2023 (ComCo 2023) in Osnabrück.
July 6, 2023 IKIDA participates in The Hessian AICon and presents current projects results.
June 14, 2023 Our paper “Interactively Learning Behavior Trees from Imperfect Human Demonstrations” got accepted for publication in Frontiers in Robotics and AI. See Publications for details.
June 02, 2023 Two papers “What Can I Help You With: Towards Task-Independent Detection of Intentions for Interaction in a Human-Robot Environment“ and “I^3: Interactive Iterative Improvement for Few-Shot Action Segmentation” got accepted at the IEEE RO-MAN 2023 taking place August 28-31 in Busan, Korea. See Publications for details.
May 31, 2023 Our paper “Interacting with Large Language Models: A Case Study on AI-Aided Brainstorming for Guesstimation Problems“ and extended abstract “Interactively Learning Behavior Trees from Imperfect Human Demonstrations” got accepted at the HHAI 2023 taking place June 26-30 in Munich, Germany. See Publications for details.
April 27, 2023 IKIDA researcher Susanne Trick was honoured by the Federal Ministry of Education and Research (BMBF) and the German Informatics Society (GI) as AI Newcomer of the Year. Congratulations! Learn more
April 23, 2023 Vildan Salikutluk presents the IKIDA paper “Situational Adaptive Autonomy in Human-AI Cooperation” @ the CHI'23 workshop AutomationXP23 in Hamburg. See Publications for details
October 2022 The IKIDA team got accepted 3 papers at 2022 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2022), taking place November 28-30 in Ginowan, Okinawa, Japan. See Publications for details
July 13, 2022 The IKIDA team visited Accso – Accelerated Solutions GmbH, an enterprise active in software engineering and IT consulting in a broad range of sectors like finance, telecommunication, media, automotive industry, logistics and more. We discussed the potential of interactive AI for industry 4.0 applications and are exited to supervise a master's thesis together with Dr. Xenija Neufeld on the topic “Detection of Unexpected Human Behavior in Human-Robot Interaction in Shared Workspaces”.
January 1, 2022 IKIDA presented and discussed its ongoing research and intermediate results at the BMBF online conference “AI All-Hands-Meeting”.
November 2021 We are very happy that our work from Collaboration with Niyati Rawal on AI for Generating Robotic Facial Expressions got accepted for publication in Frontiers in Robotics and AI. ExGenNet: Learning to Generate Robotic Facial Expression using Facial Expression Recognition N Rawal, D Koert, C Turan, K Kersting, J Peters, R Stock-Homburg Frontiers in Robotics and AI, 382
October 29, 2021 We visited our associated industry partner Energy Robotics. We thank Dr. Stefan Kohlbrecher for showing us impressive live demos of their robots Spot and EXR-1. We look very much forward to now start working together on the scenarios of Interactive Teaching and Human Aware behavior Adaptation for Inspection Robots. (see photos below)
October 2021 As of October 1, 2021, Dr. Dorothea Koert has been appointed leader of the independent junior research group IKIDA She has been leading the team since the start of the project in October 2020. Learn more (in German)
June 2021 Welcome Cigdem Turan! Cigdem joins our team as of June 1st as a postdoc. Her research focus will be facial behavior understanding, affective computing, affective human-robot Interaction, and artificial moral agents.
May 2021 We will present our work on Learning Probabilistic Movement Primitives and Sequential Behavior Trees from Non-Expert users at the IEEE-RAS International Conference on Humanoid Robots (July 19-21st, 2021)! Accepted Paper: “Guided Robot Skill Learning: A User-Study on Learning Probabilistic Movement Primitives with Non-Experts” Moritz Knaust, Dorothea Koert.
April 2021 We run through a first set of workshops with the associated industry partners Energy Robotics & Porsche Motorsport to define potential applications for interactive AI in industry. We look forward to the upcoming work on interesting topics together.
March 2021 The recent time has been filled with the elicitation of IKIDA use cases for research and experiments and the identification of potential value in industrial settings.
November 6, 2020 Inspiring official IKIDA kick-off – only virtually though, due to Corona.
October 2020 The BMBF-funded junior research group “IKIDA – Interaktive KI für Domänenexperten und Alltagsnutzer” has started on 01.10.2020. 6 young scientists will investigate interactive AI algorithms & cognitive models for human-AI interaction. Project duration 01.10.2020-30.09.2024 Learn more
Scientific Managing Director @ Centre for Cognitive Science / Focus in IKIDA: split of autonomy in interactions between humans and AI systems
dirk.balfanz@cogsci.tu-...
+49 6151 16-23736
S1|15 245
Dr.
Cigdem Turan
Postdoctoral Researcher
former team member
Carvalho, J., Baierl, M., Urain, J., & Peters, J. (2022, November 29). Conditioned Score-Based Models for Learning Collision-Free Trajectory Generation. NeurIPS 2022 Workshop on Score-Based Methods. https://openreview.net/forum?id=4Vqu4N1jjrx
Carvalho, J., Koert, D., Daniv, M., & Peters, J. (2022a). Adapting Object-Centric Probabilistic Movement Primitives with Residual Reinforcement Learning. 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids), 405–412. https://doi.org/10.1109/Humanoids53995.2022.10000148
Carvalho, J., Koert, D., Daniv, M., & Peters, J. (2022b). Residual Robot Learning for Object-Centric Probabilistic Movement Primitives (arXiv:2203.03918). arXiv. https://doi.org/10.48550/arXiv.2203.03918
Carvalho, J., Le, A., Kicki, P., Koert, D., & Peters, J. (2024). Motion Planning Diffusion: Learning and Adapting Robot Motion Planning with Diffusion Models (arXiv:2412.19948). arXiv. https://doi.org/10.48550/arXiv.2412.19948
Carvalho, J., Le, A. T., Baierl, M., Koert, D., & Peters, J. (2023). Motion Planning Diffusion: Learning and Planning of Robot Motions with Diffusion Models. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 1916–1923. https://doi.org/10.1109/IROS55552.2023.10342382
Carvalho, J., Le, A. T., Jahr, P., Sun, Q., Urain, J., Koert, D., & Peters, J. (2024). Grasp Diffusion Network: Learning Grasp Generators from Partial Point Clouds with Diffusion Models in SO(3)xR3 (arXiv:2412.08398). arXiv. https://doi.org/10.48550/arXiv.2412.08398
David, R., Franziska, H., Fabian, K., Dorothea, K., Joni, P., Jan, P., & Thomas, H. W. (2024). Entropy Based Blending of Policies for Multi-Agent Coexistence. Research Square. https://doi.org/10.21203/rs.3.rs-4562541/v1
Funk, N., Urain, J., Carvalho, J., Prasad, V., Chalvatzaki, G., & Peters, J. (2024). ActionFlow: Equivariant, Accurate, and Efficient Policies with Spatially Symmetric Flow Matching (arXiv:2409.04576). arXiv. https://doi.org/10.48550/arXiv.2409.04576
Gassen, M., Metzler, F., Prescher, E., Scherf, L., Prasad, V., Kaiser, F., & Koert, D. (2023). I³: Interactive Iterative Improvement for Few-Shot Action Segmentation. 2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 378–385. https://doi.org/10.1109/RO-MAN57019.2023.10309435
Göksu, Y., De Almeida Correia, A., Prasad, V., Kshirsagar, A., Koert, D., Peters, J., & Chalvatzaki, G. (2024). Kinematically Constrained Human-like Bimanual Robot-to-Human Handovers. Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, 497–501. https://doi.org/10.1145/3610978.3640670
Hahne, F., Prasad, V., Kshirsagar, A., Koert, D., Stock-Homburg, R. M., Peters, J., & Chalvatzaki, G. (2024). Transition State Clustering for Interaction Segmentation and Learning. Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, 512–516. https://doi.org/10.1145/3610978.3640738
Knaust, M., & Koert, D. (2021). Guided Robot Skill Learning: A User-Study on Learning Probabilistic Movement Primitives with Non-Experts. 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), 514–521. https://doi.org/10.1109/HUMANOIDS47582.2021.9555785
Palenicek, D., Lutter, M., Carvalho, J., Dennert, D., Ahmad, F., & Peters, J. (2024). Diminishing Return of Value Expansion Methods (arXiv:2412.20537). arXiv. https://doi.org/10.48550/arXiv.2412.20537
Prasad, V., Heitlinger, L., Koert, D., Stock-Homburg, R., Peters, J., & Chalvatzaki, G. (2023). Learning Multimodal Latent Dynamics for Human-Robot Interaction (arXiv:2311.16380). arXiv. https://doi.org/10.48550/arXiv.2311.16380
Prasad, V., Koert, D., Stock-Homburg, R., Peters, J., & Chalvatzaki, G. (2022). MILD: Multimodal Interactive Latent Dynamics for Learning Human-Robot Interaction. 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids), 472–479. https://doi.org/10.1109/Humanoids53995.2022.10000239
Prasad, V., Kshirsagar, A., Koert, D., Stock-Homburg, R., Peters, J., & Chalvatzaki, G. (2024). MoVEInt: Mixture of Variational Experts for Learning Human–Robot Interactions From Demonstrations. IEEE Robotics and Automation Letters, 9(7), 6043–6050. https://doi.org/10.1109/LRA.2024.3396074
Rawal, N., Koert, D., Turan, C., Kersting, K., Peters, J., & Stock-Homburg, R. (2022). ExGenNet: Learning to Generate Robotic Facial Expression Using Facial Expression Recognition. Frontiers in Robotics and AI, 8. https://doi.org/10.3389/frobt.2021.730317
Salikutluk, V., Doğan, E., Clev, I., & Jäkel, F. (2024, May). Involving Affected Communities and Their Knowledge for Bias Evaluation in Large Language Models. CHI’24 Workshop on “HEAL: Human-centered Evaluation and Auditing of Language Models.” pdf (PDF file) (opens in new tab)
Salikutluk, V., Frodl, E., Herbert, F., Balfanz, D., & Koert, D. (2023). Situational Adaptive Autonomy in Human-AI Cooperation. CHI’23 Workshop on “Automation XP23 – Intervening, Teaming, Delegating Creating Engaging Automation Experience.” pdf (PDF file) (opens in new tab)
Salikutluk, V., Koert, D., Jäkel, F. (2023). Interacting with Large Language Models: A Case Study on AI-Aided Brainstorming for Guesstimation Problems. In HHAI 2023: Augmenting Human Intellect (pp. 153–167). IOS Press. https://doi.org/10.3233/FAIA230081
Salikutluk, V., Schöpper, J., Herbert, F., Scheuermann, K., Frodl, E., Balfanz, D., Jäkel, F., & Koert, D. (2024). An Evaluation of Situational Autonomy for Human-AI Collaboration in a Shared Workspace Setting. Proceedings of the 2024 CHI Conference on Human Factors in Computing Systems, 1–17. https://doi.org/10.1145/3613904.3642564
Scherf, L., Fröhlich, K., & Koert, D. (2024). Learning Action Conditions for Automatic Behavior Tree Generation from Human Demonstrations. Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, 950–954. https://doi.org/10.1145/3610978.3640673
Scherf, L., Gasche, L. A., Chemangui, E., & Koert, D. (2024). Are You Sure? – Multi-Modal Human Decision Uncertainty Detection in Human-Robot Interaction. Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, 621–629. https://doi.org/10.1145/3610977.3634926
Scherf, L., Gasche, L., Chemangui, C., & Koert, D. (2023). Multimodal Human Uncertainty Detection in Human-AI Interaction. Presented at Computational Cognition Conference (ComCo). (Extended Abstract)
Scherf, L., Maurer, C., & Koert, D. (2024). Combining State-Dependent Trust in Policy and Human Advice for Interactive Reinforcement Learning. Presented at Human-Interactive Robot Learning Workshop (HIRL), 19th Annual ACM/IEEE International Conference on Human Robot Interaction (HRI). pdf
Scherf, L., Schmidt, A., Pal, S., & Koert, D. (2023). Interactively Learning Behavior Trees from Imperfect Human Demonstrations. Presented at the Second International Conference on Hybrid Human-Artificial Intelligence (HHAI) 2023: Augmenting Human Intellect.https://doi.org/10.3389/frobt.2023.1152595
Scherf, L., Turan, C., & Koert, D. (2022). Learning from Unreliable Human Action Advice in Interactive Reinforcement Learning. 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids), 895–902. https://doi.org/10.1109/Humanoids53995.2022.10000078
Trick, S., Herbert, F., Rothkopf, C. A., & Koert, D. (2022). Interactive Reinforcement Learning With Bayesian Fusion of Multimodal Advice. IEEE Robotics and Automation Letters, 7(3), 7558–7565. https://doi.org/10.1109/LRA.2022.3182100
Trick, S., Lott, V., Scherf, L., Rothkopf, C. A., & Koert, D. (2023). What Can I Help You With: Towards Task-Independent Detection of Intentions for Interaction in a Human-Robot Environment. 2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 592–599. https://doi.org/10.1109/RO-MAN57019.2023.10309347
Trick, S., & Rothkopf, C. (2022). Bayesian Classifier Fusion with an Explicit Model of Correlation. Proceedings of The 25th International Conference on Artificial Intelligence and Statistics, 2282–2310. https://proceedings.mlr.press/v151/trick22a.html
Trick, S., Rothkopf, C. A., & Jäkel, F. (2023). A normative model for Bayesian combination of subjective probability estimates. Judgment and Decision Making, 18, e40. https://doi.org/10.1017/jdm.2023.39
Turan, C., Koert, D., Neergaard, K. D., & Lioutikov, R. (2021). Empowering Interactive Robots by Learning Through Multimodal Feedback Channel. Proceedings of the 2021 International Conference on Multimodal Interaction, 870–871. https://doi.org/10.1145/3462244.3480982
Vorndamme, J., Carvalho, J., Laha, R., Koert, D., Figueredo, L., Peters, J., & Haddadin, S. (2022). Integrated Bi-Manual Motion Generation and Control shaped for Probabilistic Movement Primitives. 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids), 202–209. https://doi.org/10.1109/Humanoids53995.2022.10000149
M.Sc. Thesis, Jule Brendgen: The Relation between Social Interaction and Intrinsic Motivation in Reinforcement Learning, 2021
B.Sc. Thesis, Franziska Herbert: Using Multimodal Human Feedback for Reinforcement Learning, 2021
M.Sc. Thesis, Lisa Scherf: Learning to segment human sequential behavior to detect the intention for interaction, 2021
M.Sc. Thesis, Tümer Tosik: Reinforcement Learning and Implicit Feedback, 2021
B.Sc. Thesis, Simon Binz: The Role of Shielded Reinforcement Learning for Human-AI Interaction in a Collaborative Task Setting, 2022
M.Sc. Thesis, Julian Christopher Kerl: Analysing Implicit Facial Behaviour for Reinforcement Learning, 2022
B.Sc. Thesis, Marek Daniv: One Shot Graph Imitation Learning from Visual Data, 2022
B.Sc. Thesis, Erkam Ilhan: Analysis of Expert Knowledge as a Basis for AI-Aided Interactive Anomaly Detection, 2022 (in cooperation with Porsche Motorsport)
B. Sc. Thesis, Simon Jakoby: Interactive Anomaly Detection in Multivariate Timeseries Data, 2022
B.Sc. Thesis, Vilja Lott: Detecting an Intention for Interaction in a Human-Robot Environment, 2022
B.Sc. Thesis, Laura Sabioncello: The Role of Trust in AI in a Collaborative Game Setting, 2022
M.Sc. Thesis, Mattin Sayed: Solving Guesstimation Problems: Perceived Differences between Human and AI Support, 2022
B.Sc. Thesis, Nathalie Woortman: Comparing and Personalizing Human Following Behaviors for Mobile Ground Robots, 2022
M.Sc. Thesis, Chen Xue: Task Classification and Local Manipulation Controllers, 2022
B.Sc. Thesis, Isabelle Clev: An Exploration of Ethical Issues in Large Language Models, 2023
M.Sc. Thesis, Eric Frodl: Enhancing Human-AI Interaction with Probabilistic Behavior Prediction for Situational Autonomy Adaptation, 2023
B.Sc. Thesis, Jan Kegel: Solving Guesstimation Problems with a Visual Structuring Tool, 2023
M.Sc. Thesis, Jan Mackensen: A Human-Centered Approach for AI-Aided Anomaly Detection in Time Series, 2023
B.Sc. Thesis, Katrin Scheuermann: Human-AI Interaction: A Think Aloud Study on Cooperating with Autonomous Agents, 2023
B.Sc. Thesis, Janik Schöpper: Situational Autonomy in Human-AI Interaction, 2023
B.Sc. Thesis, Sophie Schumbert: The Presentation of Uncertainty in Human-AI Interaction, 2023
B.Sc. Thesis, Elifnur Doğan: An Evaluation of Name-Based Biases in Large Language Models, 2024
As the project is currently being completed, we are unfortunately no longer able to supervise new theses or accept applications.
Project Details
Project:
IKIDA – Interaktive KI für Domänenexperten und Alltagsnutzer
Project partners:
Technical University of Darmstadt (TU Darmstadt)
Project duration:
October 2020 – December 2024
Project funding:
1.95 Mio EUR
Funded by:
German Federal Ministry of Research, Technology and Space (BMFTR) During project period: German Federal Ministry of Education and Research (BMBF)
We would like to customise the information and usability of this website to your preferences and needs.
To this end, we use so-called cookies. Please choose which cookies you would like to enable when visiting our webpages.
Some of these cookies are required to load and correctly display this website on your device.
These are strictly necessary or essential cookies and cannot be deselected.
The preferences cookie saves your language setting and preferred search engine, while the statistics cookie regulates
how the open-source statistical software “Matomo” analyses your visits to and activities on our website.
For more information about cookies we use, please refer to our
privacy policy.